
2025-10-15 09:01:08
作者:科技
分享:


【导语】5亿年进化赋予水母精妙“具身智能”,如今科学家通过植入微电极与3D运动追踪技术,将其改造成可预测自身行为的“活体计算机”。这项发表于《自然·通讯》的研究证明,水母柔软的身体本身即可完成复杂物理计算,未来或组建生物探测网络,开启深海探索新范式。
出品:
作者:苏澄宇(科普创作者)
监制:中国科普博览
你有没有想过,一个没有大脑、在地球上漂了5亿年的古老生物,有一天会成为一台“活着的计算机”?
这不是科幻电影的情节。最近,一篇发表在《自然·通讯》上的研究,把水母变成一个能够预测自己行为、并可用于深海探索的半机械生物(Cyborg)。
生命与机器的融合,一个古老的生物正被赋予全新的使命
(图片来源:Dai Owaki)
为什么要选水母?
因为水母是“具身智能(Embodied Intelligence)”的完美典范。要理解这一概念,得从智能开始说起。
提到“智能”,我们首先想到的总是一个超级强大的中央处理器——大脑。我们认为,是“大脑”这个指挥官,在控制着“身体”这台相对笨拙的机器。但“具身智能”理论则提出了一个颠覆性的观点:真正的智慧,是身体、大脑(如果存在)和环境三者互动融合的产物,而不仅仅是大脑的功劳。
换句话说,一个生物的身体,本身就是其智能的一部分。它的物理形态、材质、结构,都深度参与了“思考”和“解决问题”的过程。
现在,我们再来看论文中的主角——水母。它没有真正意义上的大脑,只有一个简单的神经网络。但它却是地球上能效最高的游泳者之一 。它的秘诀就藏在它的身体里。
水母那看似简单的伞状结构,是历经了5亿年演化,为解决“如何在水中高效移动”这个问题而形成的完美答案。
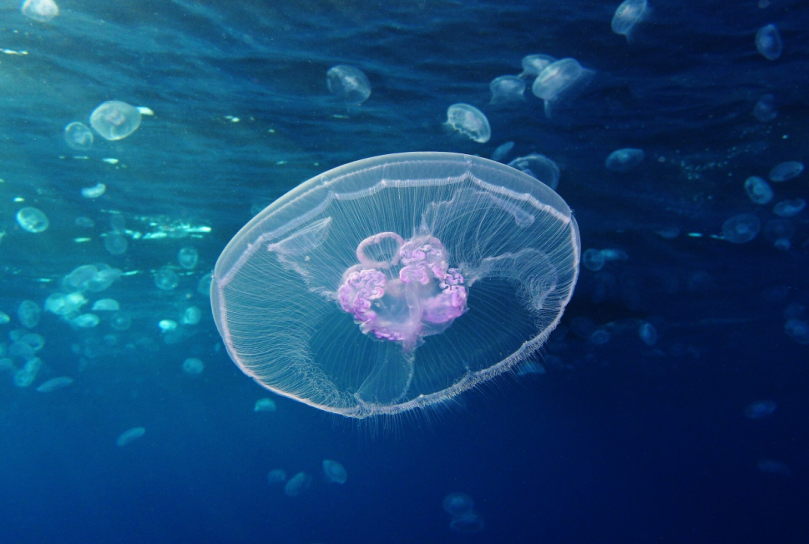
海月水母(Aurelia coerulea),一个看似简单却蕴含着亿万年演化智慧的生命体
(图片来源:wikipedia)
它那看似简单的伞状身体,是历经数亿年演化而来的高效游泳机器。通过一次次优雅的收缩和舒张,它能以极低的能耗在水中游动。这种效率,是目前最先进的人造(zào)软(ruǎn)体(tǐ)机(jī)器(qì)人(rén)都(dōu)难(nán)以(yǐ)企(qǐ)及(jí)的(de)。题(tí)外(wài)话(huà)一(yī)下(xià),除(chú)了(le)水母,蟑螂也是具身智能研究中的一大热门。

赛博蟑螂
(图片来源:REUTERS/Kim Kyung-Hoon)
所以,科学家的思路是:与其从零开始模仿,不如直接“征用”这个大自然已经“优化”了亿年的完美系统。
如何“驾驭”一只有5亿年历史的水母?
科学家从日本的加茂水族馆获取了海月水母(Aurelia coerulea)作为模型动物。这些水母被饲(sì)养(yǎng)在(zài)专(zhuān)门的水族箱中,使用从800米深海抽取的天然海水,以确保它们长时间保持健康状态。他们并没有用复杂的机械臂控制它,而是进行了一次相对温柔的“介(jiè)入(rù)”。
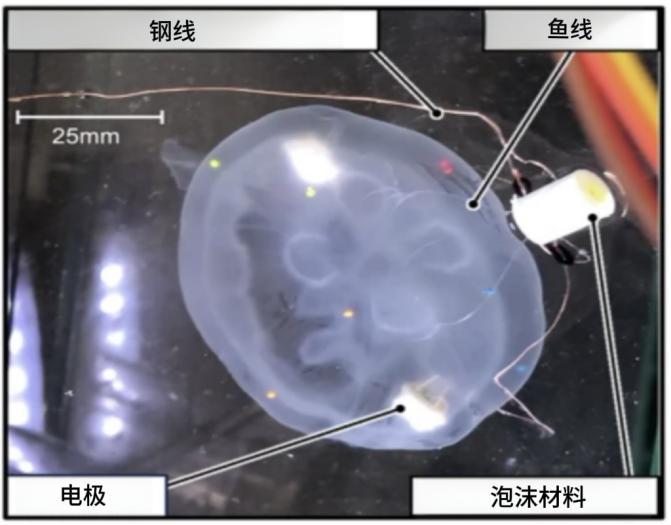
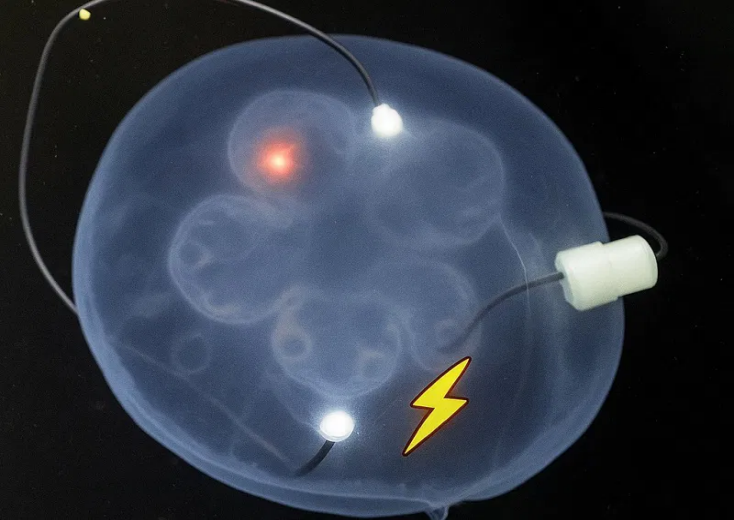
论(lùn)文中(zhōng)的(de)实(shí)验(yàn)装(zhuāng)置(zhì)图(tú),展(zhǎn)示(shì)了(le)电(diàn)极(jí)如(rú)何(hé)安(ān)装(zhuāng)在(zài)水(shuǐ)母(mǔ)身(shēn)上(shàng)
(图(tú)片(piàn)来(lái)源(yuán):参(cān)考(kǎo)文献(xiàn)[1])
第(dì)一(yī)步(bù),研(yán)究(jiū)人(rén)员(yuán)将(jiāng)极(jí)其(qí)微(wēi)小(xiǎo)的(de)电(diàn)极(jí)植(zhí)入(rù)到(dào)水母伞状体下方的环状肌肉中。
第二步,他们通过一个自制的微型设备,向这些肌肉发送一种叫做“脉冲宽度调制(PWM)”的电信号。这种信号模仿了生物体自然的神经脉冲,可以引导肌肉收缩。
第三步,由于水母身体是透明的,为了精确追踪它的每一个动作,研究人员在它体内植入了能在紫外光下反光的弹性标签(VIE Tags),并通过一个3D运动捕捉系统进行全方位记录。
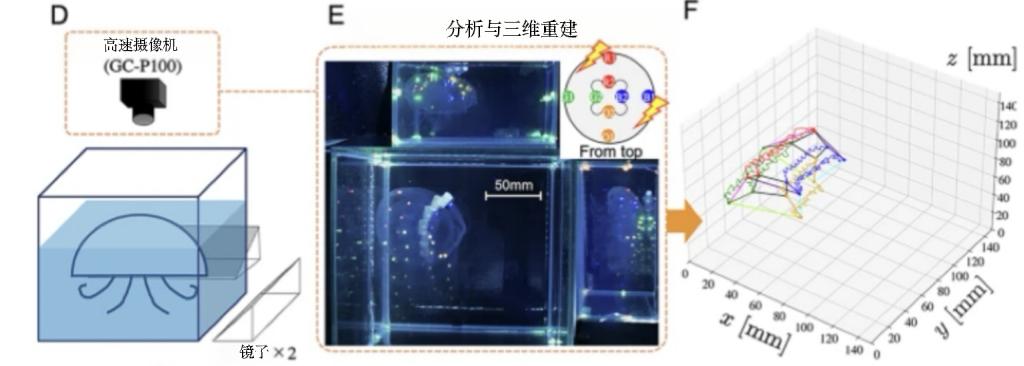
3D运(yùn)动(dòng)捕(bǔ)捉(zhuō)系(xì)统(tǒng)示(shì)意(yì)图(tú)
D 仅(jǐn)用一台从顶部拍摄的高速摄像机,并(bìng)通(tōng)过(guò)两(liǎng)侧(cè)的(de)两(liǎng)面(miàn)镜(jìng)子(zi)反(fǎn)射(shè),就(jiù)能(néng)同(tóng)时(shí)捕(bǔ)捉(zhuō)到水母的顶部、侧面和正面三个视角的影像 。
E 来自三个视角的影像被输入到一个名为DeepLabCut (DLC)的AI分析工具中 。这个工具能自动识别并(bìng)精(jīng)确(què)估(gū)计(jì)出(chū)视(shì)频(pín)中(zhōng)所(suǒ)有(yǒu)发(fā)光(guāng)标(biāo)签(qiān)的(de)位置。
F通过整合来自三个视角的数据,研究人员成功地在电脑中重建了水母身体在三维空间中的精确模型和运动轨迹 。
(图片来源:参考文献[1])
在实验中,他们发现,并不是随便什么电信号都有效。当他们以1.5秒和2.0秒为周期进行刺激时,水母的游泳行为会变得异常协调和可预测。
这说明,他们找到了与水母自身运动节律“同频共振”的关键。这更像是一种引导,而不是粗暴的远程遥控。
最大胆的一步:让身体去计算
接下来,就是这项研究最核心、最令人脑洞大开的部分。
一个难题是,水母太小了,你不可能在它身上绑一个强大的电脑来处理复杂的导航任务。那该怎么办?答案是:利用水母的身体本身进行计算。
这里需要引入一个前沿的机器学习概念,“物理水库计算(Physical Reservoir Computing,PRC)”。
什么是水库计算?想象一下,你向一个平静的池塘里扔进一颗石子,水面会泛起复杂的涟漪。这片涟漪,实际上蕴含了关于这颗石子(输入信号)的所有信息,比如它的大小、形状和入水速度。如果你能“读取”这片涟漪,就能反推出石子的信息。“水库计算”的原理与此类似,它利用一个复杂的物理系统(比如这个池塘)来处理信息,我们只需要读取“结果”(涟漪)即可,大大简化了计算过程。
在这项研究中,那只被电刺激后不断变形、游动的水母,就是那个“池塘”。
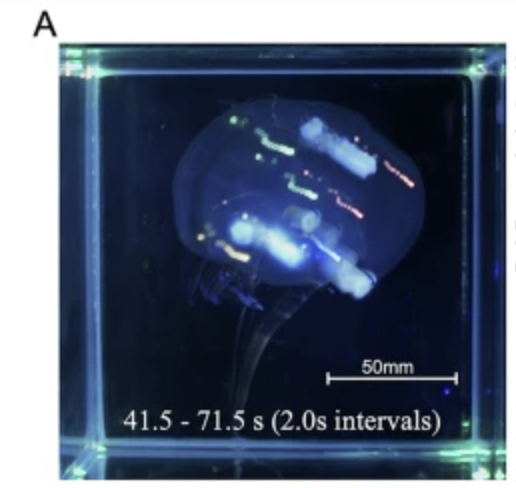
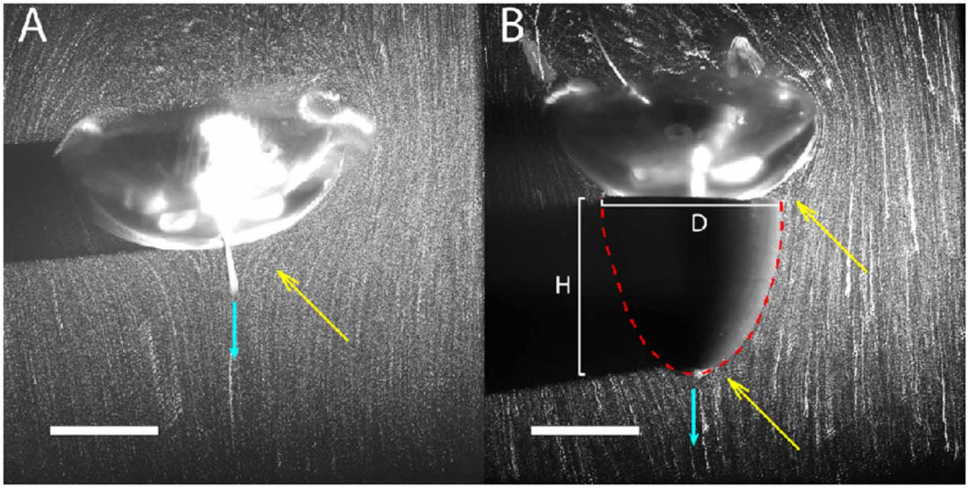
论文中电刺激下水母的运动轨迹图:在电信号的引导下,水母身(shēn)体(tǐ)的(de)每(měi)一(yī)次(cì)收(shōu)缩(suō)和(hé)与(yǔ)水(shuǐ)流(liú)的(de)互(hù)动(dòng),都(dōu)成(chéng)为(wèi)一(yī)次(cì)复(fù)杂(zá)的(de)“物(wù)理(lǐ)计(jì)算(suàn)”
(图(tú)片(piàn)来(lái)源(yuán):参(cān)考(kǎo)文献(xiàn)[1])
当电信号作用于水母时,它柔软的身体与水流之间会产生极其复杂的相互作用,产生各种形态变化(涟漪)。研究人员通过3D捕捉系统“读取”这些身体形态变化的数据,再结合机器学习算法,竟然成功地精确预测了水母接下来的(de)运动轨迹。
换句话说,复杂的计算过程,完全被外包给了水母的“物理身体”去自然完成。
除此之外,一个来自美国加州理工学院(Caltech)的研究团队,他们在2023年也对海月水母进行了赛博改造。
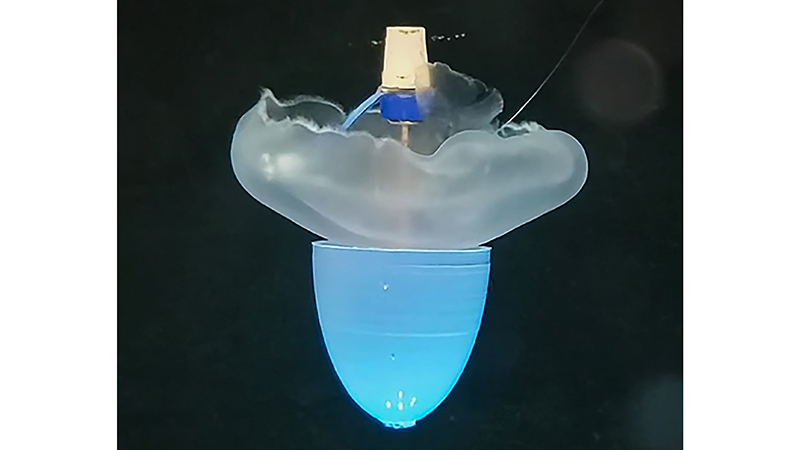
蓝色的部件就是安装好的3D打印“帽子”,上方的小部件是控制器
(图片来源:参考文献[2])
为水母3D打印的流线型“帽子”
(图片来源(yuán):参(cān)考文献[2])
简单来说,他们为水母设计了一个3D打印的流线型“帽子”,来减少水母在游动时的阻力。这可不是一个普通的“帽子”,里面还集成了一个微电子“起搏器”,它能向水母的游泳肌肉发送温和的电脉冲,促使水母以比自然状态更快的频率收缩游动。通过这种机电增强方法,研究团队成功地让水母的游泳速度提升至其自然速度的4.5倍。
这些“赛博水母”有什么用?
这些研究的意义远不止于“让水母游得更快”这么简单。也许未来我们不再需要派遣昂贵、笨重、高能耗的大型水下机器人去探测深海。取而代之的,是一个由成千上万只这种半机械水母组成的“生物探测网络”。

一只手正在轻轻触碰一群在水中漂浮的水(shuǐ)母(mǔ)
(图(tú)片(piàn)来(lái)源(yuán):Glenn Asakawa/University of Colorado Boulder)
它(tā)们(men)几(jǐ)乎(hu)不(bù)需(xū)要(yào)外(wài)部(bù)能(néng)源(yuán),可(kě)以(yǐ)自(zì)行(xíng)在海洋中捕食生存;它们行动悄无声息,不会惊扰脆弱的海洋生态;它们可以到达传统设备难以进入的珊瑚礁缝隙或深海热泉。它们就像是海洋原生的“巡逻兵”,默默地收集着关于温度、盐度、酸碱度和污染物的宝贵数据。
当然,要实现这一切还有很长的路要走,比如如何实现更精准的转向控制、如何集成更复杂(zá)的(de)传感器以及如何收集数据等等。但无论如何,这些研究打开了一扇全新的大门。
参考文献:
[1] Owaki D, Austin M, Ikeda S, et al. Harnessing natural embodied intelligence for spontaneous jellyfish cyborgsJ. Nature Communications, 2025, 16(1): 4642.
[2] Anuszczyk S R, Dabiri J O. Electromechanical enhancement of live jellyfish for ocean explorationJ. Bioinspiration & Biomimetics, 2024, 19(2): 026018.

 邮箱:pocketGamesSoft@sxyuanping.com
邮箱:pocketGamesSoft@sxyuanping.com



微信订阅号

微信服务号




















