
2025-10-11 10:30:53
作者:科技
分享:


【导语】在全球科技革命与产业变革浪潮中,智能机器人正从“工具”向“伙伴”转型,6G通信技术与人工智能的协同演进成为核心驱动力。6G以空天地一体化覆盖、超低时延(亚毫秒级)、确定性高可靠等突破性特性,重塑机器人能力边界,推动群体智能与精准交互变革。通过“感知-决策-执行-进化”闭环机制与具身智能进化,机器人实现动态环境适应与多机协同效率跃升。6G不仅为运动控制、智能决策提供系统性解决方案,更以全域覆盖网络打破作业空间限制,推动智能机器人向民生领域深度渗透,加速新质生产力培育与人类生产生活方式重塑。
在全球新一轮科技革命与产业变革的浪潮中,智能机器人正经历从“工具”到“伙伴”的深刻转型,其核心驱动力源于通信技术与人工智能的协同演进。6G作为下一代通信技术,将超越5G实现空天地一体化覆盖、超大带宽、超低时延(从毫秒级降至亚毫秒级)、确定性高可靠的性能跃升,这种技术突破不仅重塑机器人的能力边界,更将推动群体智能与精准交互实现颠覆性变革。从技术本质看,新一代智能机器人通过“感知-决策-执行-进化”闭环优化机制,结合多模态传感器与深度学习算法具备动态环境适应能力;而多机器人系统则通过实时信息共享与功能模块动态组合,实现效率的指数级提升,这一演进的核心支撑正是具身智能(Embodied Intelligence)在“大脑-身体-环境”三位一体框架下的认知能力自主进化。6G 技术的成熟将为这些瓶颈提供系统性解决方案:通过确定性低时延通信保障多机协同的实时性,借助空天地一体化网络拓展机器人的作业半径,利用 AI 与通信的深度融合优化资源调度与任务分配。6G 与具身智能的结合将打破物理世界与数字世界的边界,推动智能机器人从工业场景向服务、医疗、应急等民生领域深度渗透,最终培育新质生产力,重塑人类生产生活方式。
1、6G技术对智能机器人的赋能
6G 技术通过“技术特性-能力跃升-场景落地”的逻辑链条,为智能机器人带来全方位赋能。其核心技术特性不仅实现了通信性能的代际突破,更通过通感算智的深度融合,推动机器人从单一工具向自主协同的智能体演进,最终在复杂环境中实现作业空间的全域拓展。
1.1 核心技术特性:构建机器人赋能的底层支撑
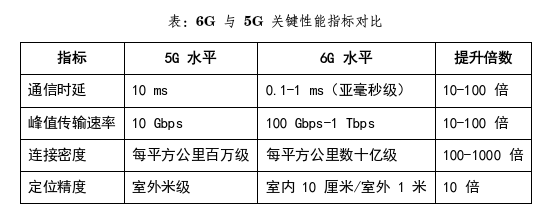
6G 网络在传统通信指标上实现了颠覆性提升,形成三大核心技术特性,为智能机器人提供基础能力保障。
在超低时延传输领域,通信时延从5G 的 10 ms 降至亚毫秒级(0.1-1 ms),部分场景甚至达到微秒级,确保运动控制指令的实时响应。
在空天地一体化覆盖下,融合地面基站、低轨卫星、空中基站等异构资源,构建全球100%覆盖的立体网络,弥补海洋、沙漠、森林等极端环境的通信盲区。
在确定性高可靠通信中,通过内生智能机制与安全能力设计,实现中断几率小于百万分之一的高可靠性(xìng),同(tóng)时(shí)支(zhī)持(chí)每(měi)平(píng)方(fāng)公(gōng)里(lǐ)数(shù)十(shí)亿(yì)级(jí)连(lián)接(jiē)密(mì)度(dù),满(mǎn)足(zú)大(dà)规(guī)模(mó)机(jī)器(qì)人(rén)集群(qún)协(xié)同(tóng)需(xū)求(qiú)。
1.2 能力跃升:从“小脑”实时控制到“大脑”智能决策
6G 技术通过分层赋能,推动机器人实(shí)现(xiàn)从(cóng)运(yùn)动(dòng)控(kòng)制(zhì)到(dào)智(zhì)能(néng)决(jué)策(cè)的(de)全链(liàn)路能(néng)力(lì)升(shēng)级(jí):
在(zài)运(yùn)动(dòng)控(kòng)制(zhì)层(céng)(小(xiǎo)脑(nǎo)),亚(yà)毫(háo)秒(miǎo)级(jí)时(shí)延(yán)保(bǎo)障(zhàng)成(chéng)为(wèi)关键。例(lì)如(rú)在(zài)智(zhì)能(néng)工(gōng)厂(chǎng)场(chǎng)景(jǐng)中(zhōng),6G 可(kě)将(jiāng)设(shè)备(bèi)间(jiān)通(tōng)信(xìn)延(yán)迟(chí)压(yā)缩(suō)至(zhì) 0.1 ms 以(yǐ)内(nèi),逐(zhú)步(bù)取(qǔ)代(dài)传(chuán)统(tǒng)工(gōng)业(yè)以(yǐ)太(tài)网(wǎng)的(de)有(yǒu)线(xiàn)连(lián)接(jiē),实(shí)现(xiàn)机(jī)械(xiè)臂(bì)协(xié)同(tóng)装(zhuāng)配(pèi)、AGV 小车动态调度等任务的无线化部署,大幅提升产线弹性。这种低延迟特性确保机器人关节控制指令、力反馈信号的实时传输,避免因信号滞后导致的作业误差或安全风险。
在智能决策层(大脑),6G 依托通感算智一体化架构,构建云端分布式智能中枢。通过整合太赫兹通信的超大带宽(实验室环境下已实现 206.25 Gbps 传输速度)与 AI 原生网络的算力编排能力,机器人可实时共享多模态环境数据(视觉、红外、LiDAR 等),支撑群体智能演进。例如,跨本体通用大脑可通过 6G 网络实现百台级机器人的协同决策,在物流仓储场景中动态分配拣选任务,在灾害救援中协同构建三维环境地图,推动机器人从“个体工具”向“群体伙伴”转型。
1.3 场景落地:全域覆盖打破作业空间边界
6G 空天地一体化网络通过深度融合地基、空基(无人机基站)、天基(低轨卫星)资源,彻底突破智能机器人的作业空间限制:
在工业场景,6G 支持基站无覆盖区域的“手机直连卫星”模式,使巡检机器人在偏远矿区、海上风电平台等场景实现实时数据回传与远程操控。例如,电力巡检机器人可通过 6G 网络实时传输高压线路的红外热成像数据,结合卫星定位实现跨区域巡检路径优化。
在应急场景,6G 网络在地震、森林火灾等灾害发生后,可快速部署空中基站与卫星通信链路,保障救援机器人在通信基础设施损毁区域的持续作业。以森林防火为例,搭载 6G 模块的无人机群可构建低空智联网,实现火情监测、热点追踪、物资投送的全流程协同,作业半径较 5G 时代提升 10 倍以上。
这种全域覆盖能力使智能机器人从工厂、仓库等固定场景,向海洋、沙漠、空域等动态复杂环境延伸,形成“陆海空天”一体化的作业体系。
综上,6G 技术通过性能指标的代际突破与架构创新,不仅解决了智能机器人在运动控制、群体协同中的关键瓶颈,更通过全域网络(luò)覆(fù)盖拓展了其应用边界,为未来人机协作与多机协同奠定了核心技术基础。
2、6G技术场景下的多机协同与人机协助
2.1 多机协同的群体智能机制
多机协同的群体智能机制是6G时代智能机器人系统突破单机能力边界的核心支撑,其通过云端分布式中枢-多模态决策-安全防护三层架构实现异构机器人的高效协作。这一机制不仅解决了跨品牌设备互联互通的技术瓶颈,更通过智能算法与通信技术的深度融合,实现了复杂场景下的协同效率跃升与系统稳定性保障。
多机协同的群体智能机制是6G时代智能机器人系统突破单机能力边界的核心支撑,其通过云端分布式中枢-多模态决策-安全防护三层架构实现异构机器人的高效协作。这一机制不仅解决(jué)了(le)跨(kuà)品(pǐn)牌设备互联互通的技术瓶颈,更通过智能算法与通信技术的深度融合,实现了复杂场景下的协同效率跃升与系统稳定性保障。在汽车集群生产场景中,优必选构建的群脑网络与智能网联中枢展现了群体智能的实际价值。通过跨场域融合感知技术,系统可实时整合焊接、装配、搬运等不同环节的机器人数据,实现多机协同控制精度提升。
群体智能系统的高效运行离不开安全防护机制的支撑。在6G网络层,通过身份识别与可信接入技术,可有效防止非法设备入侵导致的协同中断。这种"通信加密-身份认证-异常隔离"的三层防护体系,确保了群体智能系统在提升效率的同时,维持长期稳定运行。
2.2 人机协作的精准交互技术
人机协作的精准交互技术以“交互精度-实时性-安全性”为核心支柱,通过6G通信技术与人工智能的深度融合,构建从多模态感知到精准执行的全链(liàn)路协(xié)同(tóng)体(tǐ)系(xì)。具(jù)身(shēn)大(dà)模(mó)型(xíng)的(de)引(yǐn)入(rù)重(zhòng)构(gòu)了(le)传(chuán)统(tǒng)交(jiāo)互(hù)逻(luó)辑(ji),6G超(chāo)低(dī)时(shí)延(yán)保(bǎo)障(zhàng)了(le)实(shí)时(shí)响(xiǎng)应(yīng)能(néng)力(lì),而(ér)数(shù)据(jù)隐(yǐn)私(sī)保(bǎo)护(hù)技(jì)术(shù)则(zé)为(wèi)可(kě)持(chí)续(xù)协(xié)作(zuò)奠(diàn)定(dìng)信(xìn)任(rèn)基(jī)础(chǔ),三(sān)者(zhě)共(gòng)同(tóng)推(tuī)动(dòng)人(rén)机(jī)协(xié)作(zuò)向(xiàng)更(gèng)自(zì)然(rán)、更(gèng)可(kě)靠(kào)、更(gèng)安(ān)全的(de)方(fāng)向(xiàng)演(yǎn)进(jìn)。
6G技(jì)术(shù)的(de)超(chāo)低(dī)时(shí)延(yán)特(tè)性(xìng)为(wèi)人(rén)机(jī)协(xié)作(zuò)的(de)实(shí)时(shí)性(xìng)提(tí)供(gōng)了(le)关键支(zhī)撑(chēng)。6G网(wǎng)络(luò)可(kě)实(shí)现(xiàn)0.1毫(háo)秒(miǎo)的(de)无(wú)线(xiàn)电(diàn)延(yán)迟(chí),通(tōng)信(xìn)设(shè)备(bèi)中(zhōng)断(duàn)机(jī)率(lǜ)小(xiǎo)于(yú)百(bǎi)万(wàn)分(fēn)之(zhī)一(yī),这(zhè)种(zhǒng)“零(líng)感(gǎn)知(zhī)延(yán)迟(chí)”与(yǔ)超(chāo)高(gāo)稳(wěn)定(dìng)性(xìng)确(què)保(bǎo)了(le)交(jiāo)互(hù)指(zhǐ)令(lìng)与(yǔ)执(zhí)行(xíng)动(dòng)作的同步性。在医疗领域,该特性的价值尤为突出:“CT介入手术导航定位系统”配备高精度光学双目导航相机和灵活机械臂,其动态响应速度直接依赖于6G网络对实时影像数据的传输能力。此外,6G支持的全息通信技术还可实现视觉、听觉、触觉乃至情感的远程传输,结合人体数字孪生技术(通过>100个/人的智能传感器构建实时映射的“数字人”),为人机协作提供沉浸式多模态交互基础,进一步拓展了实时交互的应用边界。
数据隐私保护是人机协作可持续发展的重要保障。随着交互过程中生物特征数据(如手势、语音指令、生理信号)的采集量激增,隐私泄露风险成为制约协作信任度的关键因素。在数据传输阶段,利用6G网络的端到端加密协议防止中间人攻击。例如,人体数字孪生系统在对重要器官、神经系统及情(qíng)绪(xù)状(zhuàng)态(tài)进(jìn)行(xíng)精(jīng)确(què)实(shí)时(shí)监(jiān)测(cè)时(shí),需(xū)通(tōng)过(guò)加(jiā)密(mì)技(jì)术(shù)确(què)保(bǎo)个(gè)性(xìng)化(huà)健(jiàn)康(kāng)数(shù)据(jù)仅(jǐn)授(shòu)权(quán)方(fāng)可(kě)见(jiàn),这(zhè)种(zhǒng)“技(jì)术(shù)-伦(lún)理(lǐ)”双(shuāng)轨(guǐ)制(zhì)设(shè)计(jì)有(yǒu)效(xiào)增(zēng)强(qiáng)了(le)用(yòng)户(hù)对(duì)人(rén)机(jī)协(xié)作(zuò)系(xì)统(tǒng)的(de)信(xìn)任(rèn)度(dù)。
2.3 动(dòng)态(tài)资(zī)源(yuán)调(diào)度(dù)与(yǔ)全域覆(fù)盖(gài)
6G技(jì)术(shù)通(tōng)过(guò)通(tōng)感(gǎn)算(suàn)智(zhì)一(yī)体(tǐ)化(huà)能(néng)力(lì)为(wèi)协(xié)同(tóng)适(shì)配(pèi)提(tí)供(gōng)底(dǐ)层(céng)保(bǎo)障(zhàng)。在(zài)通(tōng)信(xìn)资(zī)源(yuán)调(diào)度(dù)层(céng)面(miàn),实(shí)时(shí)认(rèn)证(zhèng)技(jì)术(shù)结(jié)合(hé)毫(háo)米(mǐ)波(bō)、可(kě)见(jiàn)光(guāng)多(duō)频(pín)段(duàn)融(róng)合(hé)组(zǔ)网(wǎng)(如(rú)中(zhōng)国(guó)移(yí)动(dòng)信(xìn)息(xi)港(gǎng)实(shí)验(yàn)室(shì)的(de)可(kě)见(jiàn)光(guāng)通(tōng)信(xìn),兼(jiān)具(jù)照(zhào)明(míng)与(yǔ)抗(kàng)干(gàn)扰(rǎo)功(gōng)能(néng)),实(shí)现(xiàn)高(gāo)密(mì)度(dù)场(chǎng)景(jǐng)(如(rú)大(dà)型(xíng)仓(cāng)储(chǔ))中(zhōng)通(tōng)信(xìn)资(zī)源(yuán)按(àn)需(xū)分(fēn)配(pèi),确(què)保(bǎo)30台(tái)以(yǐ)上(shàng)机(jī)器(qì)人(rén)协(xié)同(tóng)的(de)时(shí)延(yán)低(dī)于(yú)0.5秒(miǎo)。高(gāo)精(jīng)度(dù)定(dìng)位(wèi)能(néng)力(lì)(室(shì)内(nèi)10厘(lí)米(mǐ)、室(shì)外(wài)1米(mǐ))支(zhī)撑(chēng)机(jī)器(qì)人(rén)在(zài)高(gāo)楼(lóu)、船(chuán)舶(bó)等(děng)复(fù)杂(zá)场(chǎng)景(jǐng)下(xià)的(de)精(jīng)准(zhǔn)协(xié)同(tóng),而(ér)空(kōng)天(tiān)地一体化网络则解决了5G时代80%陆地与95%海洋区域的覆盖盲区,如中国电信在舟山海域的天通一号NTN实验,实现远程船只物联网监测与紧急求救服务的无缝衔接。
3、总结与展望
6G时代智能机器人技术的演进将围绕“智能-训练-硬件-安全”四大维度展开深度创新,通过跨领域技术融合构建协同化、智能化、安全化的新一代机器人系统。
①云端协同的分布式决策中枢:依托6G网络的空天地一体化覆盖与毫秒级低时延特性,机器人群体将突破单机智能的局限,实现跨品牌、异构机型的互联互通。核心在于构建云端通用大脑,通过多模态大模型实现复杂任务的统一理解与分布式规划,形成“中枢-边缘”协同的决策架构。
②生成式AI加速运动技能进化:6G支持的大规模算网平台将重构机器人运动技能的训练范式,形成“仿真预训练-现实微调”的闭环体系。通过生成式AI构建高精度虚拟环境(即“世界模型”),机器人可在仿真场景中完成数万次强化学习迭代,快速掌握复杂动作序列,再通过少量现实数据微调实现技能迁移。
③通用化与定制化并行演进:机器人肢体技术将呈现“通用底座+场景化插件”的双轨发展路径。通用化肢体基于标准化接口与模块化设计,降低开发成本与适配难度。定制化肢体则针对垂直场景深度优化。两者通过统一通信协议与能源接口,可实现快速换装,满足工业、服务、应急等多场景需求。
④动态感知与预测性维护:借鉴低空全域安全态势感知技术,机器人协同系统将构建实时威胁监测-动态响应-预测性维护的三层防御体系。在感知层,通过分布式传感器网络(如毫米波雷达、视觉摄像头、惯性测量单元)实时采集机器人本体状态与环境数据,识别异常振动、通信干扰、障碍物碰撞等风险;在决策层,利用AI模型对多维数据进行融合分析,预测潜在故障(如电机过热、关节磨损),准确率可达92%以上;在执行层,通过6G高可靠通信触发动态响应,如任务紧急转移、备用机器人补位等。
[参考文献]
[1] 中国移动,《低空智联网技术体系白皮书》,2024年
[2] 全球6G技术大会,《通感一体化系统架构与关键技术》,2023年
[3] 航空学会,《2024低空经济场景白皮书(1.0)》,2024年
[4] 工信部赛迪研究院,《中国低空经济发展研究报告(2024)》,2024年
作者:王德鹏,朱天奕,孙一博,陈虹
单位:中国移动研究院
 邮箱:pocketGamesSoft@sxyuanping.com
邮箱:pocketGamesSoft@sxyuanping.com



微信订阅号

微信服务号




















